
Robotic automation makes a lot of sense for manufacturing especially when companies are looking to scale their business. What sets successful manufacturers apart from their competition is their ability to get their products to market quickly, while keeping costs down. High-speed automation brings many benefits to manufacturing such as flexibility, accuracy, and consistency. When considering robots for your production line, choosing the right end-of-arm tool (EOAT) is vital to increasing throughput. Manufacturers will not have success in achieving throughput with industrial robots using the wrong EOAT.
For an industrial robot to function at optimal performance, the end-of-arm tool (EOAT) has to do the heavy lifting. That’s right. In high-speed operations, the EOAT is the star of the show, needing to be able to quickly (and reliably) pick and place a range of products without damage. Robots can’t compensate for the EOAT that is flinging your product around because it doesn’t have a firm grasp. There is a higher danger of product damage in high-speed operations because without a firm grasp, products can slip, fly, or shear off the EOAT. A reliable grasp will allow the robot to move at higher speeds. We hear it all the time–engineers are running the robot at 100% and then slow the operation down to accommodate speed. There is a better option.
Unreliable grasping is the reason why manufacturers are unable to grow their business with automation. Choosing the right EOAT for the application will ensure the highest productivity, throughput, and quick ROI. Manufacturers need an adaptable tool that can reliably handle products at high speeds safely and without damaging products. Our mGrip system picks up products with an enveloping grasp, wrapping around the product firmly to ensure a reliable hold – even at high speed. Check out this video of our soft gripper solution handling products at high speed. To improve throughput, a reliable grasp is paramount to high-speed automation.
Not all EOATs are created equally and choosing the wrong one can increase downtime and drive down productivity which is not what we’re looking for in a high-speed automation process. To increase throughput, operations need to be running with zero downtime. As consumer-centric manufacturing is driving more low mix/high volume manufacturing, manufacturers are faced with a new problem. If you’re handling one product, a tool changeover is not required but what happens when you have more than one SKU – or if your products vary in shape, size, or weight – such as with meal kitting? Manufacturers don’t have the time or budget to build a new solution for every SKU or variability that’s introduced in the production line. To maximize production and investment, manufacturers need a solution that can handle a large variety of products, keeping your downtime down and your production time high. Soft Robotics has already solved the variability problem. Our technology enables manufacturers to pick and place varied products using just one tool. With unlimited flexibility, you can build an EOAT that best suits your production needs and not the other way around. Can you imagine a solution that can actually scale WITH your business?
We have production applications running over 100 picks per minute (PPM)–that’s fast! To understand how we’re able to run this fast, we look at pick rate. Pick rate is the number of picks a robot can pick and place in one minute. Our soft grippers can open and close 3-4 times per second. That’s faster than a human hand. To demonstrate how fast this is, we need to look at the dwell time, pick location, and move time. mGrip can start closing the fingers before reaching the product (pick location) and opening before the place location, eliminating unnecessary dwell.
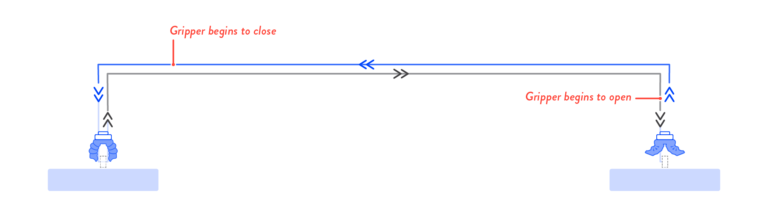
In this example of snack bars, the gripper starts closing 40 milliseconds before reaching the pick location. The gripper dwells at the pick location for only 30 milliseconds. Then, the gripper starts opening 5 milliseconds before reaching the place location and dwells for 30 milliseconds. The full cycle is 580 milliseconds. That’s under one second for this application.
High-speed operations call for an EOAT solution that can keep up with the robot. An EOAT that can reliably grasp varied products and can quickly adapt to products in real-time will certainly achieve higher pick rates and less downtime. These robots prove that speed contributes to productivity and can provide ROI for manufacturers. An industrial robot paired with mGrip will help companies achieve throughput. Find out if mGrip is right for you by taking this short quiz.
